
")
ACT Standaard Bundel
ACT compleet inclusief Residual Bus Simulatie (RBS)
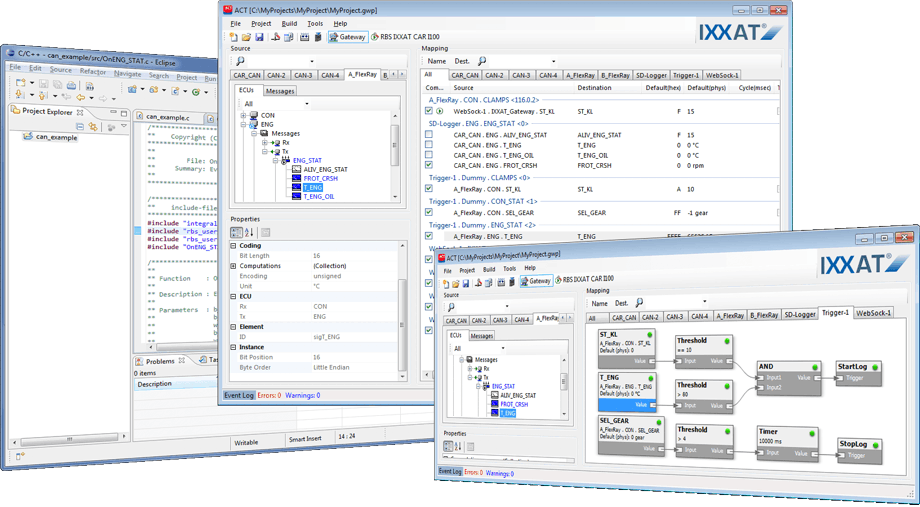
Het Automotive Configuration Tool (ACT) is een krachtig en eenvoudig te gebruiken PC softwarepakket voor de Embedded Platforms met veelzijdige functies.
Deze software bundel omvat de volgende onderdelen:
- Gateway - Gateway & Bridging
- Logger - Datalogger & Trigger
- Matlab & EtherCAT - Matlab/Simulink & EtherCAT
- Residual Bus Simulatie (RBS) - Berichtstimulatie
- Basis - IxAdmin, Editor, Visualisatie en Ontwikkelgereedschap
Functies & Modules
Detail-overzicht van de functies en modules in deze bundel:
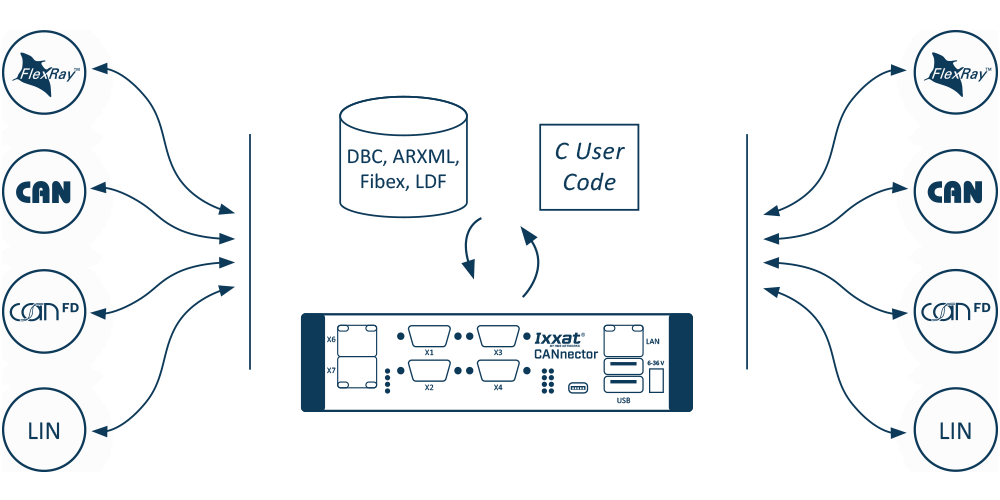
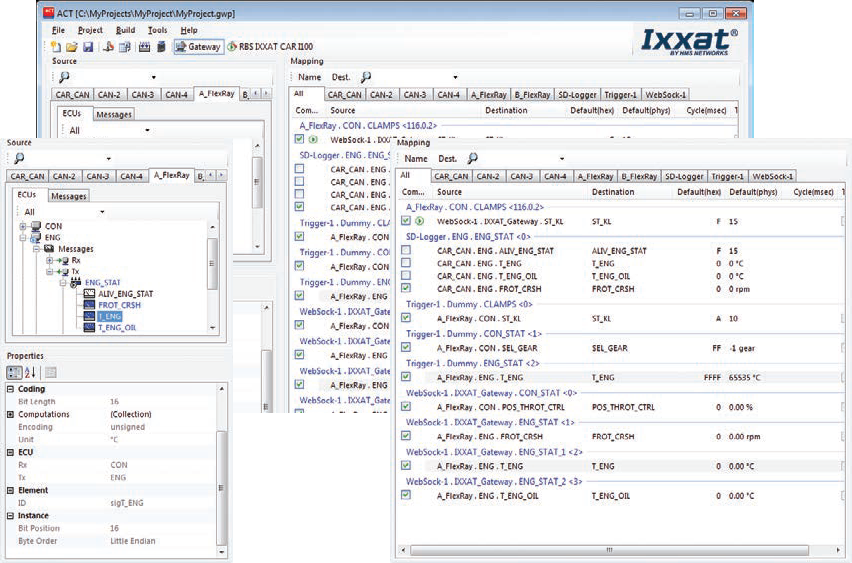
De gateway verzorgt niet alleen de gegevensoverdracht van de ene CAN-bus naar de andere, maar maakt het ook mogelijk om "logische" bussystemen - zoals gebruikerscode, datalogger, Matlab/Simulink (optie), enz. - te verbinden met de algehele gegevensuitwisseling. Met deze strategie is het mogelijk om elk frame, PDU of signaal afzonderlijk van bron naar bestemming te routeren. Dit kan direct of maar bijvoorbeeld ook via gebruikerscode om de gegevens on the fly te manipuleren.
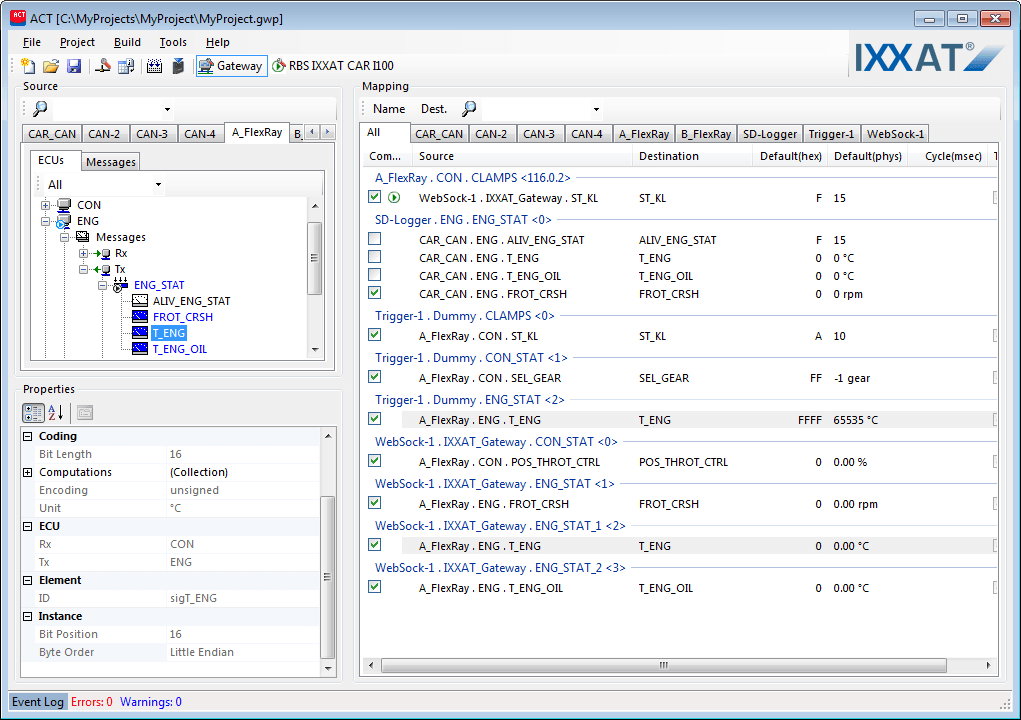
Dit is mogelijk door de Gateway-weergave van de ACT-tool te gebruiken en met drag & drop de relatie tussen bron en bestemming te definiëren. Sleep gewoon de gewenste gegevens van de bronbus en laat ze op de bestemming vallen - niet relevant of dit een echt bussysteem is of de gebruikerscode, logger of iets anders. Aan het einde kan de gemaakte configuratie worden geladen op een Ixxat embedded platform en stand-alone worden uitgevoerd. Een bus beschrijving bestand kan worden verstrekt voor fysieke FlexRay, CAN en CAN-FD bussystemen. Met behulp van de signaal-gebaseerde gateway is het daardoor mogelijk om signalen uit verschillende bronberichten te combineren in een doel-bericht. De FRC-EP- en CANnector-apparaten bieden ook analoge of digitale I/O-poorten. Met ACT kunt u deze signalen gebruiken zoals elk ander signaal in uw configuratie.
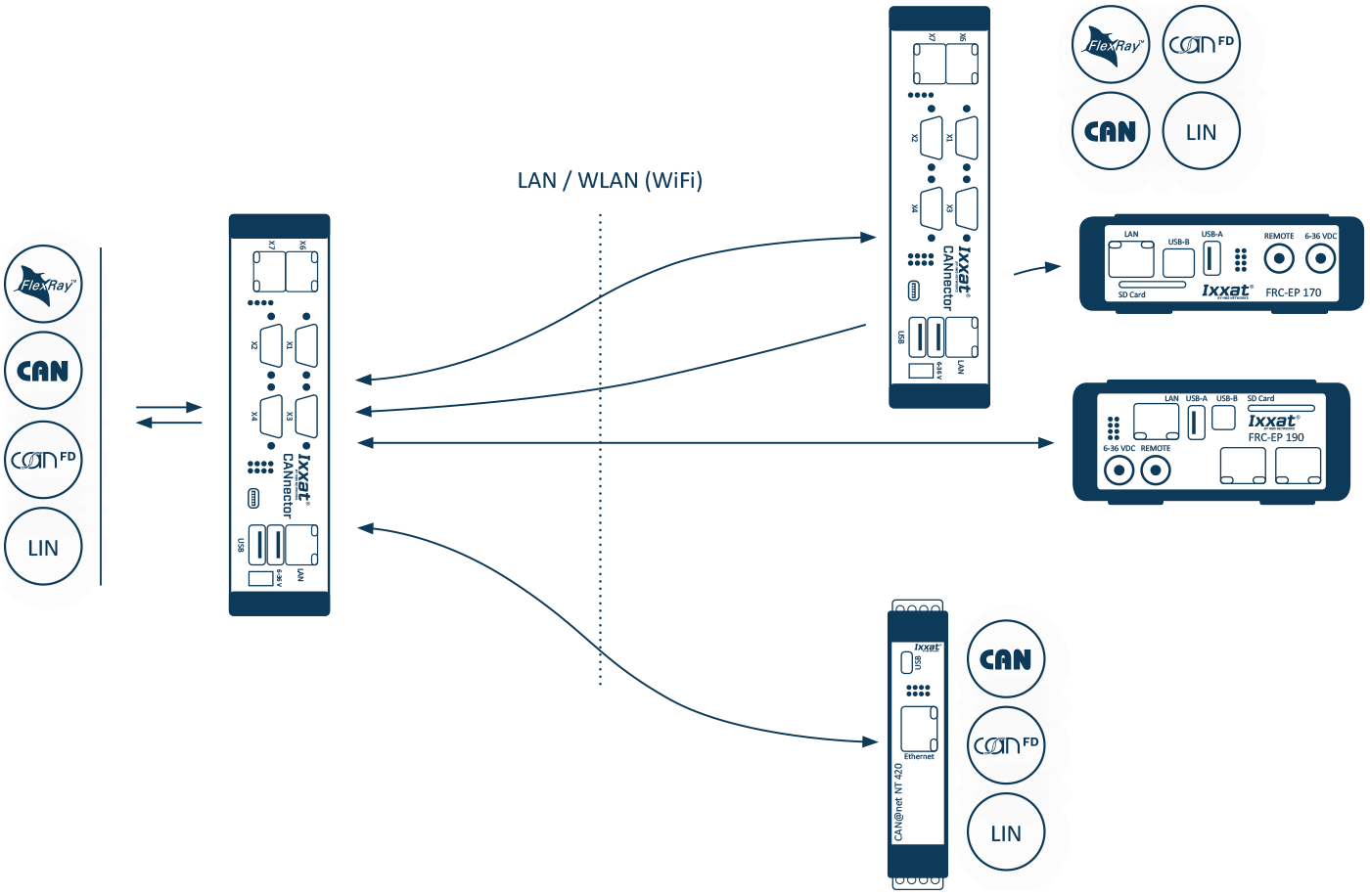
Ixxat’s Generic Ethernet-protocol maakt verbindingen over grote afstand mogelijk. Generic Ethernet is een virtueel CAN (FD), FlexRay of LIN bussysteem op Ethernet. Door middel van ACT kan de gewenste data van/naar het Generic Ethernet bussysteem gemapt worden.
De gegevens worden vervolgens via Ethernet gedistribueerd en kunnen worden vertaald naar de fysieke protocollen met behulp van de CANnector of FRC-EP-serie apparaat. Dit is de klassieke range extender.
Er kunnen maximaal 16 van dergelijke virtuele bussen worden geconfigureerd. Hiermee kan de gewenste gegevens niet naar één maar naar maximaal 16 verschillende IP-adressen of poorten worden distribueert. Zodoende is het mogelijk een eigen op Ethernet gebaseerde communicatienetwerk te creëren en gewoon CAN (FD), FlexRay of LIN-protocollen te gebruiken op de last mile.
Het Generic Ethernet-protocol maakt ook de combinatie mogelijk van Ixxat CAN@net-apparaten met CANnector of FRC-EP-serie apparaten. Deze opent de mogelijkheid om uit te breiden tot maximaal 136 CAN/72 CAN FD-interfaces.
Voeg met behulp van ACT data logging-functionaliteit toe aan de configuratie. De loggerbus is een 'logische' bus binnen ACT die alleen gegevens kan ontvangen.
Elk signaal binnen de configuratie - CAN (FD), LIN, FlexRay-signaal/frames, UserCode, enz. - kan via drag en drop worden toegewezen aan de loggerbus en kan vervolgens worden opgenomen op massaopslag apparaat, of de cloud, voor latere analyse. De logger ondersteunt:
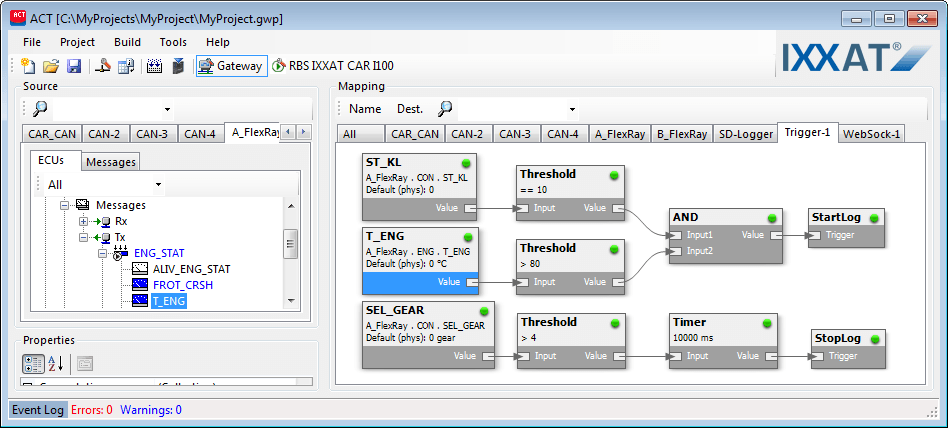
De trigger is een andere logische bus die aan de ACT-configuratie kan worden toegevoegd. Bij gebruik, kan elk signaal binnen de configuratie worden toegewezen aan de triggerbus door middel van het drag & drop-concept en als ingangssignaal worden gebruikt. De trigger-engine kan grafisch worden vormgegeven. Er kunnen verschillende functionele blokken worden gebruikt:
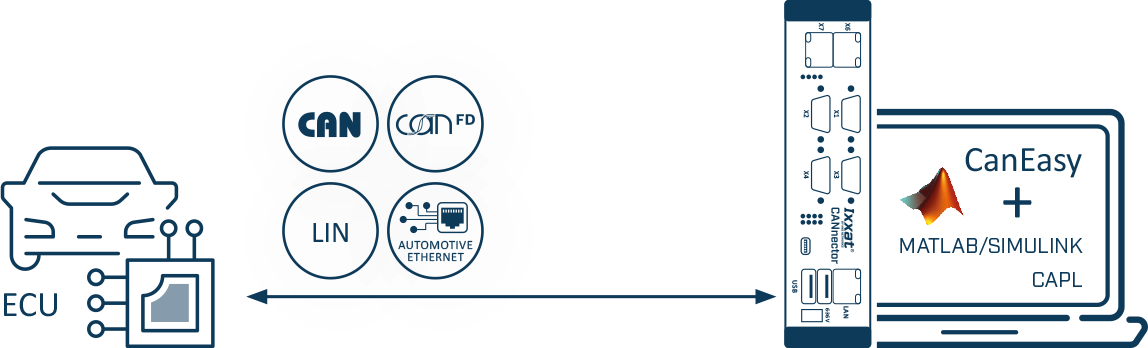
ACT maakt veel verschillende configuraties mogelijk, maar biedt natuurlijk niet alle mogelijke functionaliteit. In dat geval kan een configuratie worden uitgebreid met een eigen C gebruikerscode. Voor sommige gebruikers is de ontwikkeling van C code wellicht te complex of bestaan er al modellen vanuit andere projecten. De integratie van deze modellen is mogelijk via een API, gebaseerd op de gebruikerscode bus. Net als bij de gebruiker code, kan een Matlab/Simulink model dan toegang tot de gemapte signalen en berichten. Deze optie voor ACT maakt de integratie van MATLAB/Simulink modellen in de algehele configuratie mogelijk. Indien gewenst genereert ACT automatisch een basismodel met daarin alle signalen die zullen worden uitgewisseld. Dit basismodel bevat de API voor de rest van het systeem en de signaaltransformatie van onbewerkte naar fysieke signaalwaarde afhankelijk van de definities in de onderliggende busbeschrijvingsbestanden. Het enige dat benodigd is, is de gewenste functies ontwerpen met MATLAB/Simulink of het reeds bestaande model kopiëren en in het basismodel plakken. Aan het einde wordt de uitvoerbare module automatisch uit dit model gegenereerd en geïntegreerd in de algehele configuratie die standalone wordt uitgevoerd op het CANnector- of FRC-EP-serie apparaat.
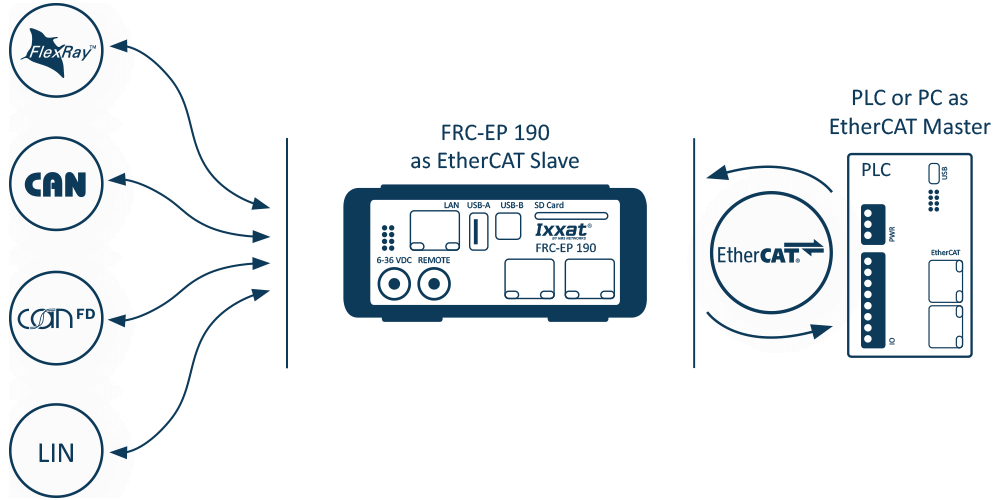
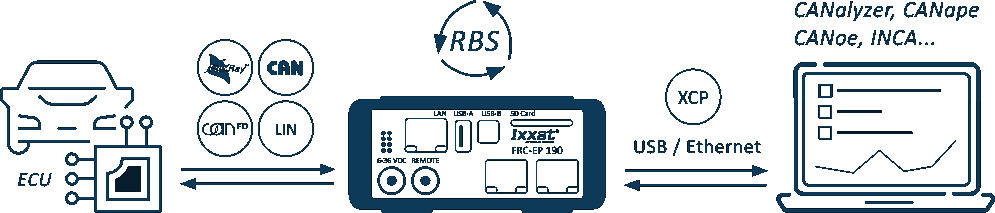
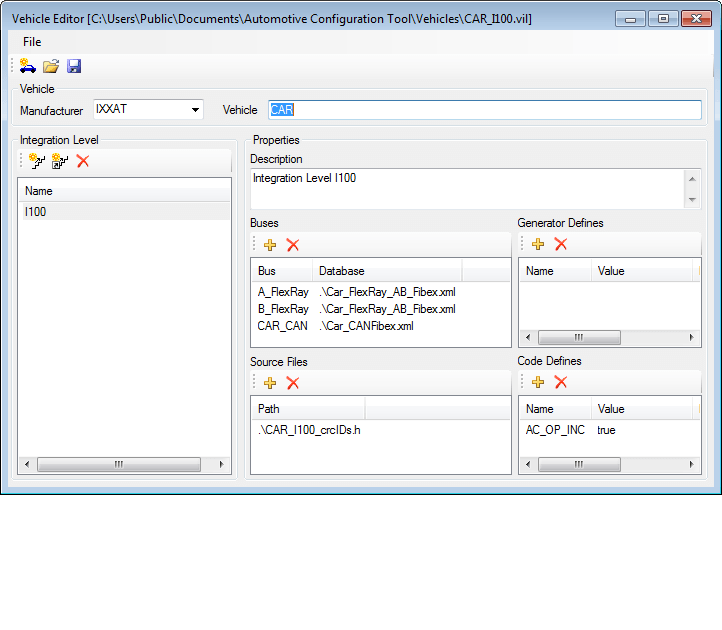
Dit is beschikbaar voor een apparaat uit de CANnector of FRC-EP-serie met een EtherCAT-extensie. Binnen ACT kan vervolgens eenvoudige drag & drop gebruikt worden om mappings van/naar de EtherCAT-slave te genereren. ACT genereert ook automatisch een bijbehorend ESI-bestand dat samen met elke geschikte EtherCAT-master kan worden gebruikt om uw EtherCAT-netwerk comfortabel te configureren. De Fast Data Exchange-protocol is een Ethernet-communicatie-interface en is een populair alternatief voor XCPonEthernet voor toegang tot fysieke signalen. De RBS weergave van ACT voorziet in een simulatie-omgeving voor elektronische controle-eenheden (ECU's) om ze onafhankelijk van andere netwerkapparaten te kunnen testen. Op basis van de FlexRay/CAN RBS en de XCPonEthernet-uitbreiding kunnen de verzonden signalen van de RBS worden gedefinieerd en aangepast. Dit omvat bijvoorbeeld: De besturing van de signaalaanpassing kan plaatsvinden via gebruikerscode, de gateway of via XCPonEthernet. Administratie-tool voor het embedded platform dat via USB, Ethernet of Wi-Fi met het apparaat verbonden is. Basis voor de meeste oplossingen vormen de bus beschrijvingen in CANdB, FIBEX of AUTOSAR-XML-formaat. De beschrijvingen bevatten een grote hoeveelheid informatie, maar vaak niet alle benodigde data. Met behulp van de Vehicle Editor kan alles wat hoort bij een bepaald voertuig, een integratie-niveau of een test configuratie eenvoudig worden gecombineerd.Gateway
FlexRay, CAN & CAN FD
Analoge & digitale I/O
Na de configuratie van de datarichting, waardenbereik, conversieregels en eenheden, kunnen de I/O’s gemakkelijk gemapped worden via drag & drop. Dit maakt het mogelijk om trigger-ingangen/-uitgangen van de logger te mappen of voertuigsignalen op basis van analoge ingangen in te vullen.
Bridging
Voor de aansluiting van de datastroom rechtstreeks op een pc, kan de VCI-driver gebruikt worden om het apparaat als een externe pc-interface te gebruiken. Het Generic Ethernet-protocol is heel eenvoudig te implementeren op elk doelbesturingssysteem via een communicatie script.Datalogger
Trigger
Door deze blokken te verbinden, is het mogelijk om een triggerlogica te definiëren die vervolgens resulteert in triggersignalen als uitvoer van de triggermotor. Deze uitgangen zijn normale signalen zoals elk ander signaal in de configuratie. Ze kunnen worden gebruikt om:
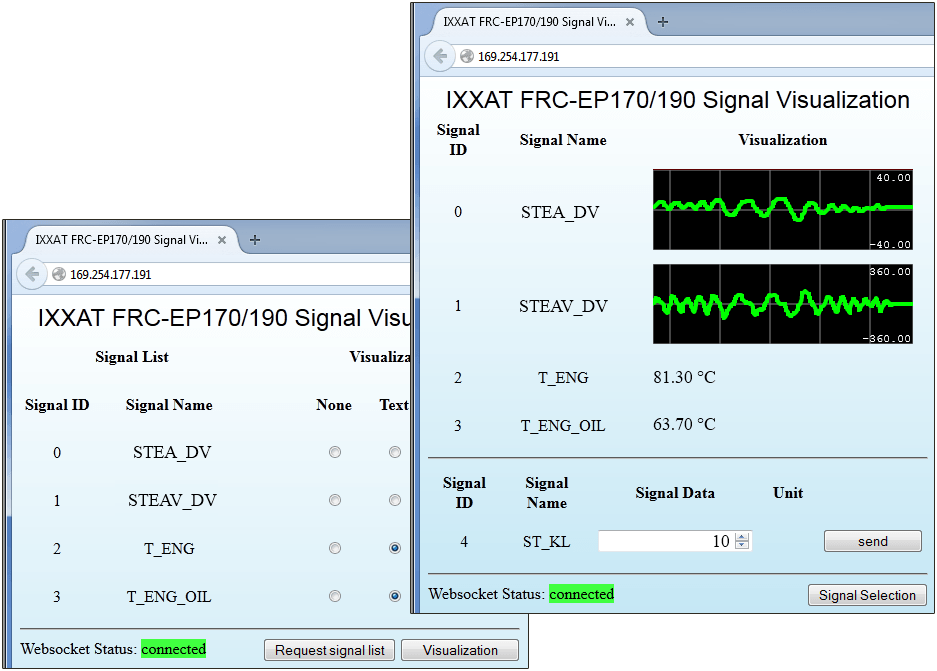
Signaalvisualisatie
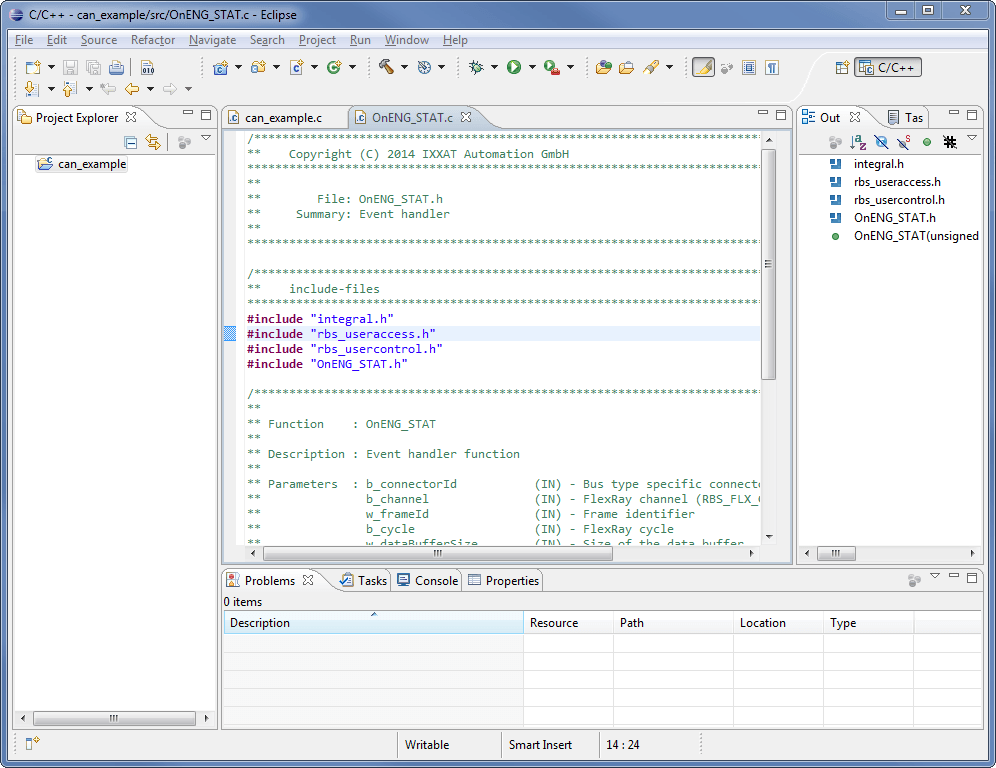
Ontwikkelgereedschap (UserCode)
Een op Eclipse gebaseerde ontwikkelomgeving is beschikbaar voor de ontwikkeling van eigen applicaties. Met behulp van deze ontwikkelomgeving kan gebruiker code voor de uitbreiding van een ACT-oplossing of voor volledig gescheiden toepassingen worden gecreëerd. ACT genereert een C-gebruikerscodesjabloon die al de API bevat om functies met de rest van het systeem te verbinden. Dit wordt ondersteund door de integratie in het ACT-project, de handige editor, cross-compiler, evenals een high-level taal debugger. De ontwikkelde applicaties kunnen stand-alone of op de Ixxat embedded systemen worden uitgevoerd.Functionele modellen
Matlab/Simulink & EtherCAT
MATLAB/Simulink
EtherCAT
Eenmaal verbonden met EtherCAT, worden alle gegevens - afkomstig van het CAN (FD), Flexray of LIN-bussysteem of van een andere op EtherCAT gebaseerde sensor of IO-apparaat - gesynchroniseerd en op hetzelfde communicatiesysteem naar een SPS of PC gedistribueerd om de testuitvoering te regelen .
FDX
Met ACT worden alle benodigde signalen via het drag & drop-concept van/naar het FDX-bussysteem in kaart gebracht. ACT genereert automatisch het overeenkomstige XML-beschrijvingsbestand voor de FDX-bus. Dit XML-bestand kan in de target softwareoplossing worden geïmporteerd en is zodoende direct klaar om gegevens te lezen of te verzenden.
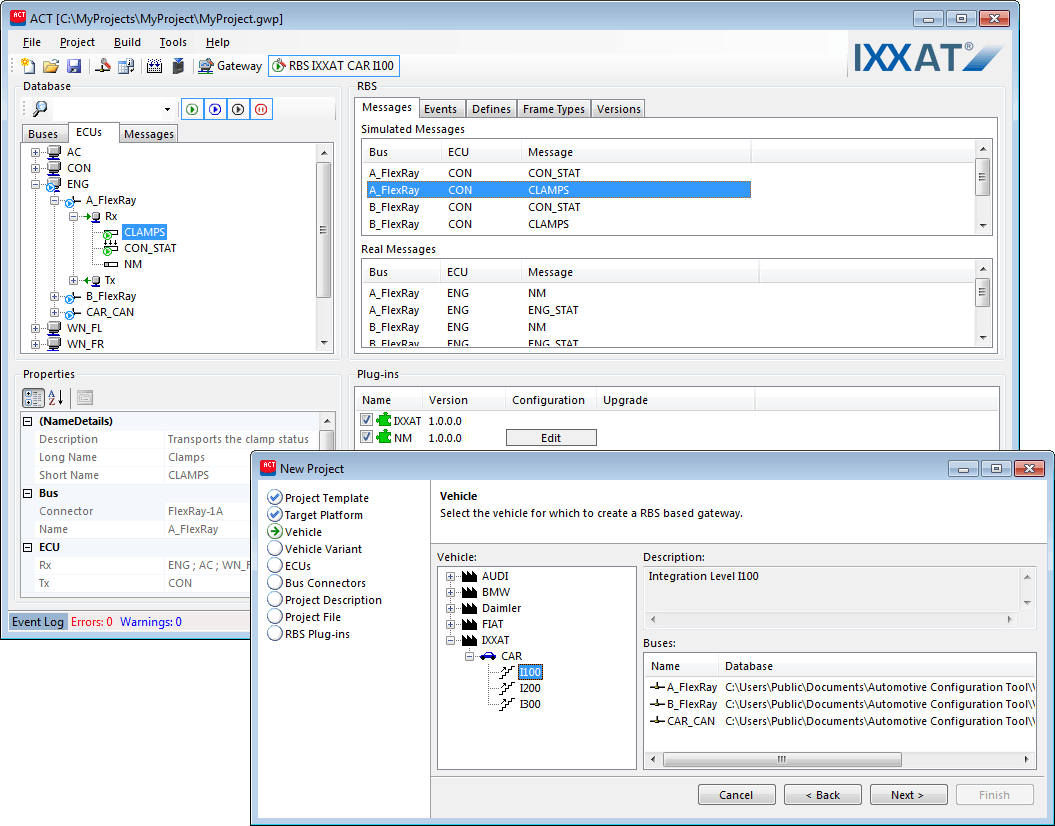
Residual Bus Simulation (RBS)
Onze RBS wordt automatisch gegenereerd door middel van een voertuigbeschrijvingsdatabase die gedefinieerd is met de geïntegreerde voertuigeditor. Selecteer de gewenste ECU's) en ACT bouwt de configuartie:
XCPonEthernet
HIL signaal manipulatie
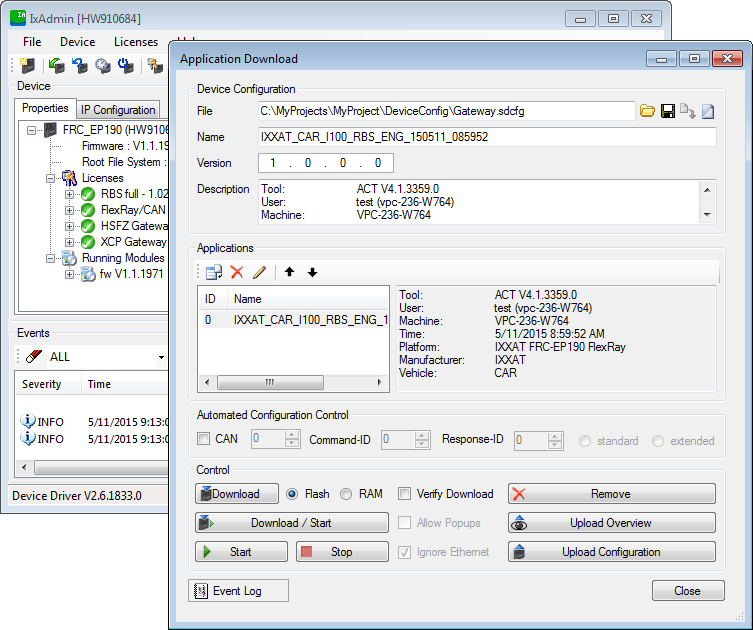
IxAdmin
Vehicle Editor
| Leveromvang |
| - Programma voor Windows™ |
| - USB licentie-dongle (vereist één USB 2.0 aansluiting) |
| - Gebruikershandleiding |
Bestelnummer(s)
Basis, Gateway, EtherCAT en Residual Bus Simulation (RBS)
Opmerking
Voor de Gateway en RBS zijn run-time licenties op het Embedded Platform benodigd