
")
CANnector
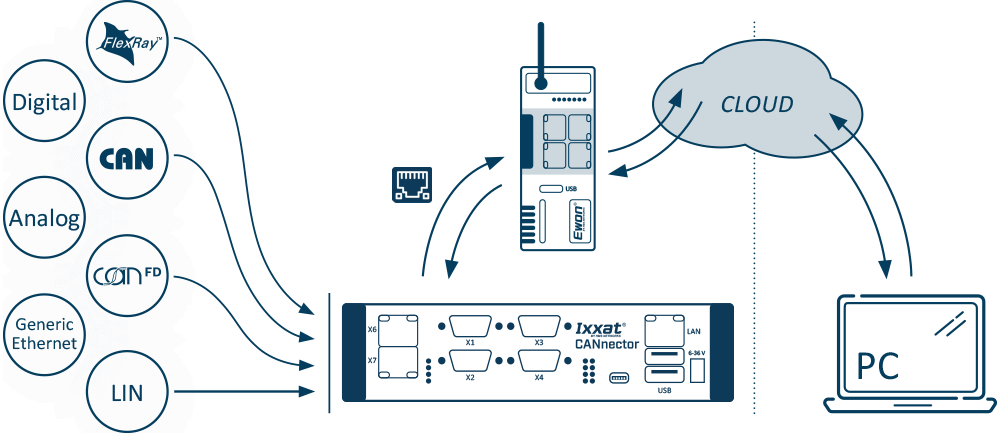
Flexible all-rounder: gateway, logger, bridge and range extender
All applications run on the device, a PC is only needed for configuration or stimulation/visualization of data, as the actual intelligence – for e.g. the transport protocols – is outsourced to the embedded platform.

With the advanced configuration tool (ACT), Ixxat offers easy-to-use Windows-based software that allows users to configure the device via drag and drop. Most use cases can be solved by using ACT Free (free), which is available for downloadd.
Highlights
- DIN rail mountable
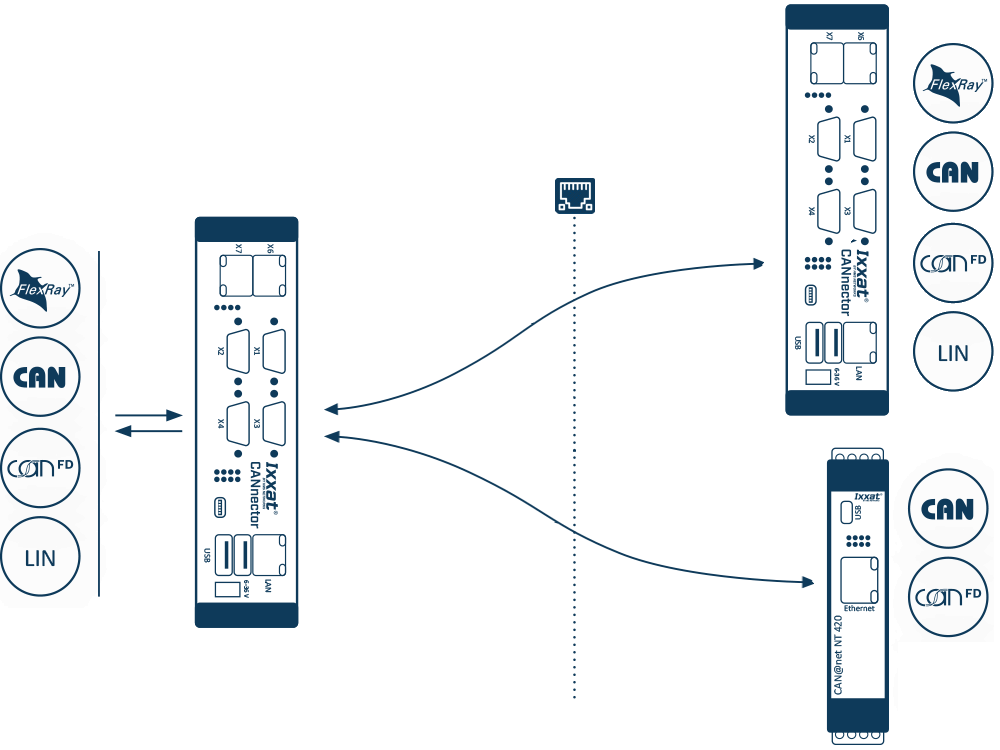
- Gateway, Bridging, Range and Logging for CAN, CAN FD, LIN and other protocols
- Industrial Ethernet support (like EtherCAT)
- Up to 8 CAN (FD) channels in one device
- CAN listen only (CAN RX) for data logging use-cases
- Only a few µs delay of frames in classical gateway applications
- Switch-on CAN (self switch on in case of any CAN communication or a defined message)
- Up to 4 kV galvanic isolation
- Compatible to the Ixxat CAN@net Generic Ethernet protocol and CAN@net NT protocol
High performance and versatile
Thanks to a powerful Linux platform, CANnector is able to execute complex applications and data manipulations directly on the device. The support of DBC files also makes it possible to work at signal level. By using ‘Wake-up on CAN’ and the option to disable the CAN TX function, the device can be used in applications that are battery powered or where the (measurement) system is absolutely not allowed to influence the CAN channels.
Cloud and PLC connection
Ixxat CANnector offers numerous additional functions, enabling, for example, live data visualization and simulation using mobile devices (smartphone or tablet) via Wi-Fi, or cloud connectivity via OPC-UA, MQTT or via HMS Hub ™ – HMS’s proprietary solution for industrial data connectivity.
The EtherCAT slave interface provides CAN connector for a direct connection of CAN (FD) -based networks with industrial Ethernet networks or a PLC.
Simple configuration via drag & drop
Ixxat offers a free Windows tool with which CANnector can be easily configured, whereby the ‘connections’ between source and target are made with a Drag and Drop concept. CAN (FD) bus descriptions can optionally be imported for configuration. The standard number of functions can be expanded with the help of the integrated development and debug environment and proprietary C user code or Matlab / Simulink models, which can be executed directly on the device.
Pre configurations
Om gebruikers op weg te helpen, bieden we, naast de standaard versie, het apparaat aan met drie verschillende voor-configuraties. Of course, these configurations can also be put together yourself, using the supplied ACT software.
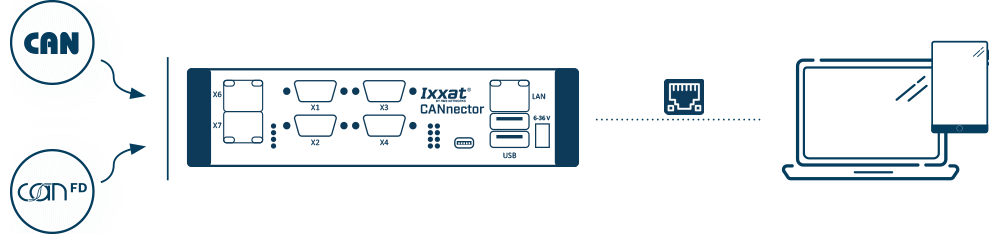
- CANnector Range
Direct intended for the exchange of CAN 2.0A/B- and CAN FD-data, for example to PCs or to server environments. If desired, the CANnector can be accessed remotely using the Ixxat VCI drivers. - CANnector Bridge
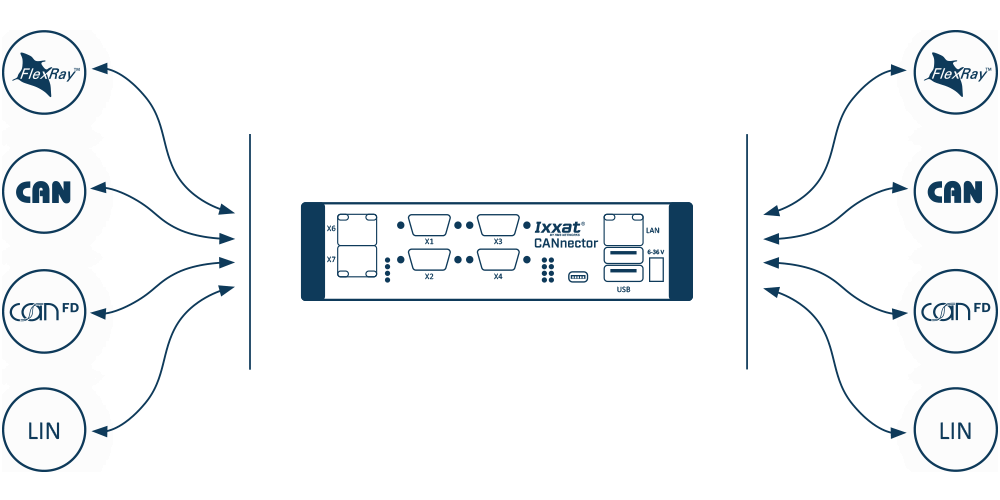
Exchange of exactly the desired information between different networks mutually, including data manipulation. - CANnector Log
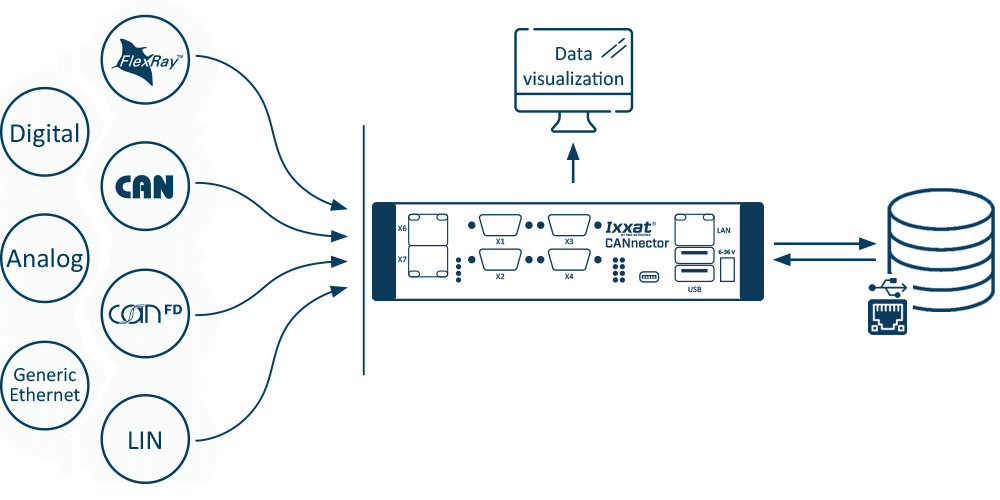
Data logger with trigger and ring buffer for storing the desired CAN messages on USB memory. CAN connector has a sleep mode to prevent the battery from discharging and can be reactivated via CAN. - With the help of an external router, and possibly G4 modem, the data can also be delivered in the cloud, to any desired cloud storage.
These configurations can be easily modified, overwritten, combined or exchanged using the supplied Configuration software to achieve the typically desired functionality. All functions can be performed simultaneously on the device, so that, for example, data logging and CAN (FD) bridging and data visualization on mobile devices can be performed side by side.
Variants
The offered hardware is available with up to eight CAN 2.0A/B, partly also CAN FD, two LIN, Ethernet, USB, two digital I/Os and one Ethercat slave interface. USB extensions for Wi-Fi and Bluetooth are available as options.
| CANnector | CAN | CAN FD 1 | LIN | EtherCAT 2 | Digital I/O | Ethernet | USB |
|---|---|---|---|---|---|---|---|
| CANnector Log 3 4 | 4 | 2 | 2 | 0 | 2 | 1 | 1 / 2 |
| CANnector Range 3 | 4 | 2 | 2 | 0 | 2 | 1 | 1 / 2 |
| CANnector Bridge 3 | 4 | 2 | 2 | 0 | 2 | 1 | 1 / 2 |
| CANnector S | 4 | 2 | 2 | 0 | 2 | 1 | 1 / 2 |
| CANnector L | 4 | 4 | 2 | 0 | 2 | 1 | 1 / 2 |
| CANnector S with EtherCAT | 4 | 2 | 2 | 1 | 2 | 1 | 1 / 2 |
| CANnector L with EtherCAT | 4 | 4 | 2 | 1 | 2 | 1 | 1 / 2 |
1 = CAN FD is always combined with CAN 2.0A / B, so the first CAN column is the total number of channels
2 = EtherCAT slave node
3 = CANnector S with pre configuration
4 = Comes with a 16GByte USB storage device
| Technical Data | |
| Interfaces | - Up to 8x CAN 2.0A/B-interfaces |
| - Including up to 4x CAN-FD-interfaces | |
| - 2x LIN-interface | |
| In-/Outputs | - Up to 4x digital input (max. 34 V) |
| - Up to 4x digitale output (max. 34 V, 1 A) | |
| Additional interfaces | - Ethernet 10/100 |
| - EtherCAT Slave (optional) | |
| - 1x USB device, Mini USB-B | |
| - 2x USB host, USB-A | |
| Connectors | 4x D-Sub9 for CAN, CAN FD, LIN and Digital I/O |
| 1x Mini USB (device) | |
| 2x USB A (host) | |
| 1x RJ45 for Ethernet | |
| 2x RJ45 for EtherCAT In & OUT | |
| 1x Three-pole Phoenix for power supply | |
| Host system | Power PC, 256 MByte RAM, 256 MByte Flash |
| CAN transceiver | Texas Instruments SN65HVD251 - High speed |
| CAN FD transceiver | Microchip MCP2562FD |
| CAN RX only | Hardware switchable |
| CAN bus termination resistor | CAN 2.0A/B: High-speed |
| CAN FD: None | |
| Power supply | 6-36 V DC |
| Power consumption | Typ. 420 mA at 12 V (sleep mode < 2 mA) |
| Housing | Aluminum, Stainless steel |
| Protection class | IP40 |
| Relative humidity | 10-95%, non-condensing |
| Operating temperature | -40 °C to +80 °C |
| Weight | Appr. 790 g |
| Dimensions (L x W x H) | 196 x 113 x 43 mm |
| Contents of delivery |
| - CANnector |
| - Runtime licences Gateway |
| - Advanced Configuration Tool (ACT) Free Bundle via download (Windows™) |
| - Configuration cable (USB) |
| - Ethernet cable (RJ45) |
| - User Manual |
Part number(s)
CANnector Standard

CANnector Standard with preconfigurations


